Intro
In the aerospace technology field, and many other engineering fields of study more broadly, the control of a system’s trajectory is essential to achieve complex objectives. Also known as Thrust Vector Control (TVC), this is carried out by independently controlling the thrust direction and magnitude of each of the engines for a rocket for instance. To simulate this type of rocket’s control in a simplified way, this project deals with the study of a small-scale prototype where the system is replaced by a high-performance drone racing propellers. A non-exhaustive explanation of the working principle of such system is given later in the report.
The under-constraints control of this drone is achieved through the development of Model Predic- tive Control (MPC) methods for different situations and different control objectives. This report tackles the design of MPC regulators and MPC tracking controllers for the linearized system. As well as, the simulation of the nonlinear rocket behaviour subject to the controllers previously de- signed. The offset-free tracking method is also addressed. Finally, an approach to non-linear MPC is given.
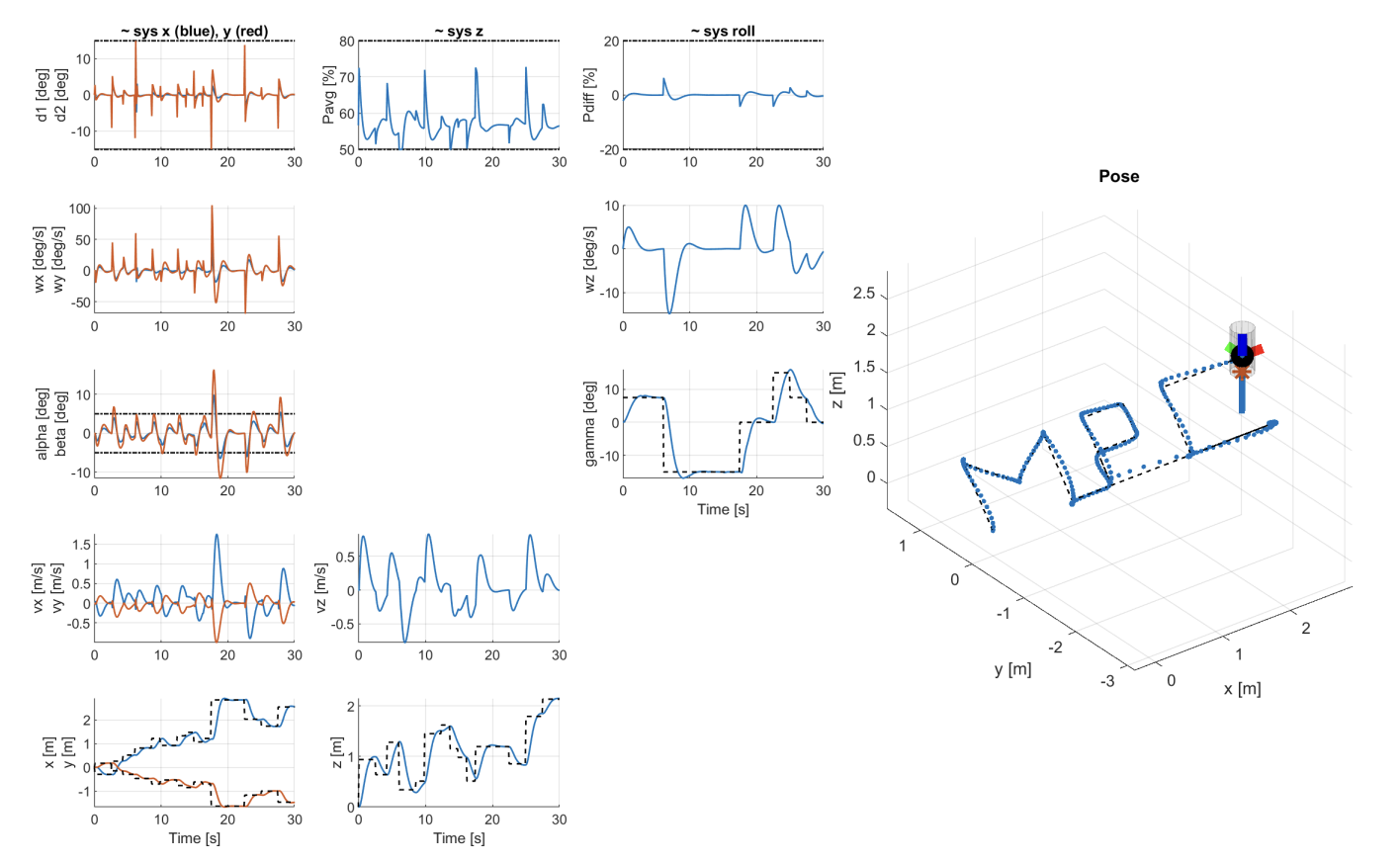
NMPC in nonlinear simulation